

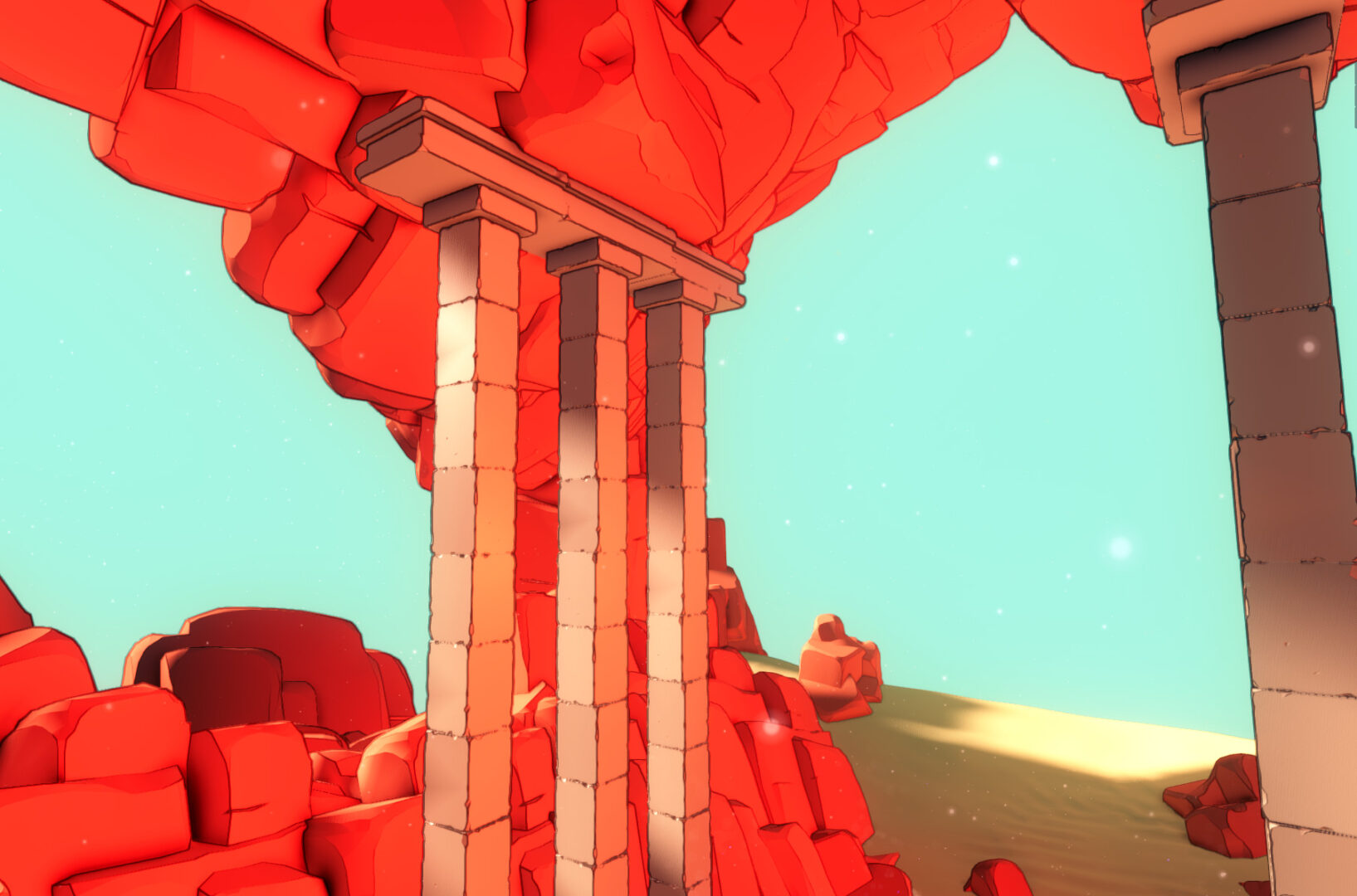
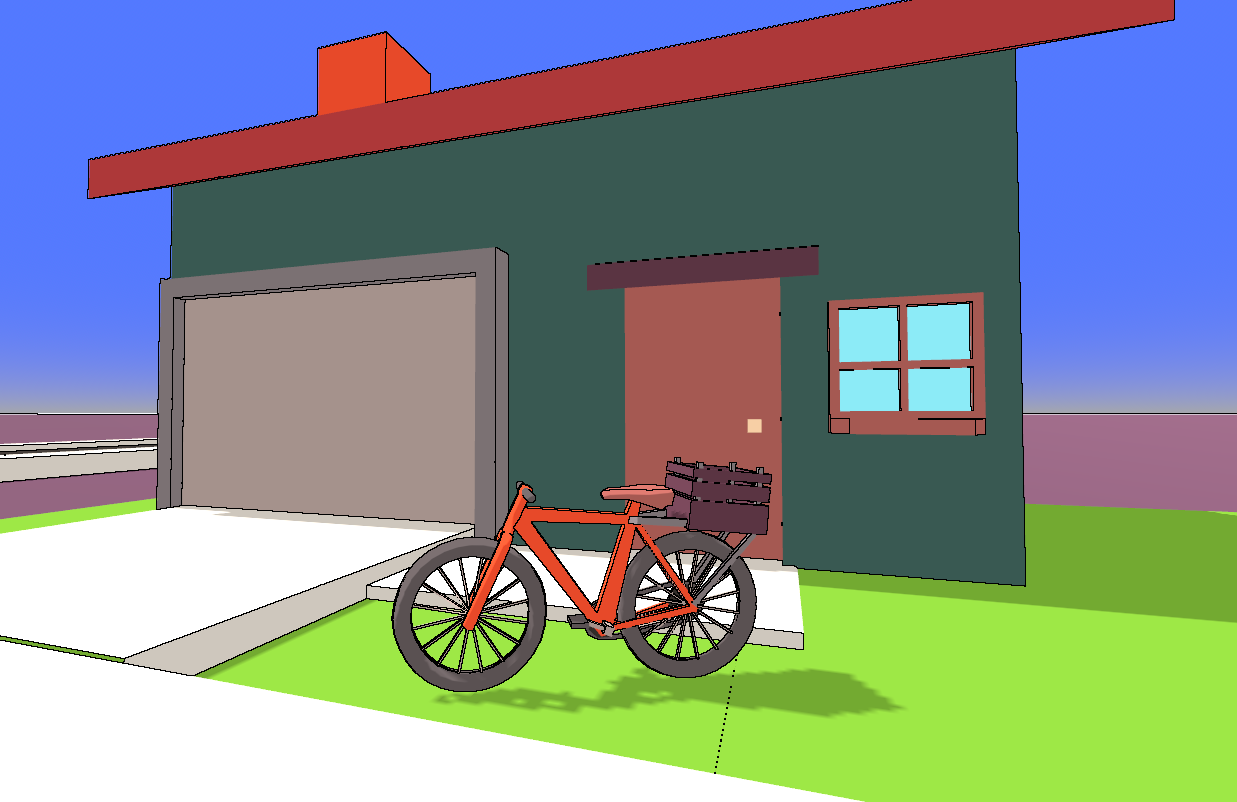
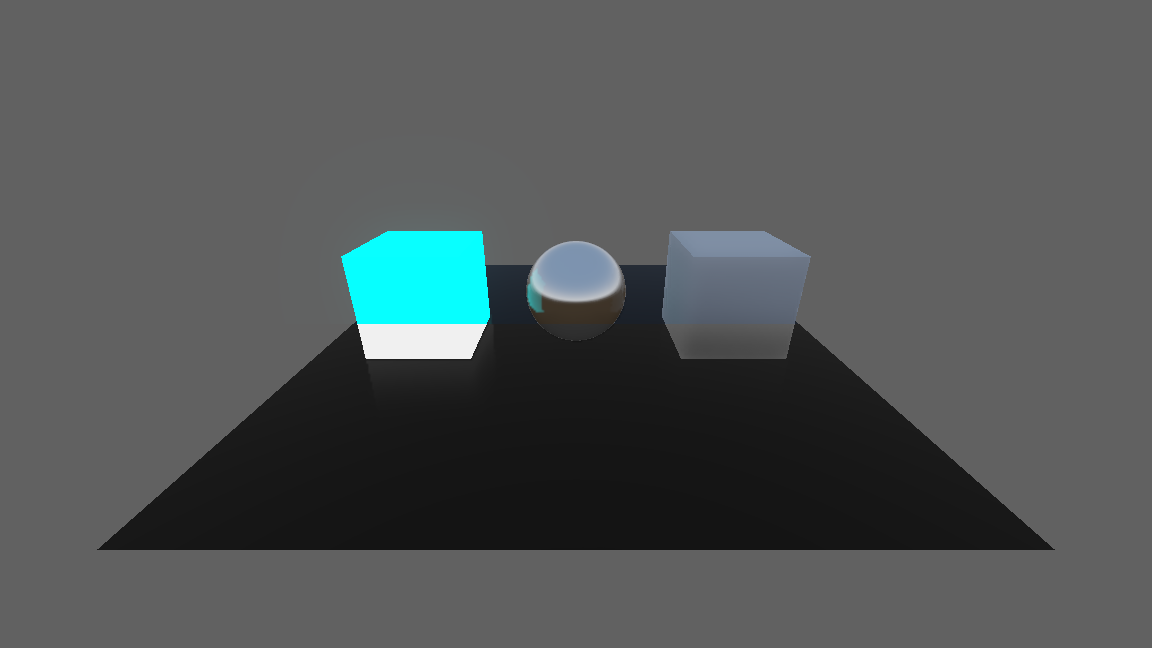
High Quality Post Process Outline

HOW TO USE:
1. Create a MeshInstance3D node with a QuadMesh and place it in your scene.
2. Set it’s size to 2×2.
3. Enable the “Flip Faces” option and add the maximum extra cull margin.
4. Create a new shader material with this shader.
5. Assign the material to the MeshInstance3D
LIMITATIONS:
– Does not work well with TAA enabled.
TESTED ENGINE VERSION: 4.0.3
Shader code
shader_type spatial;
render_mode unshaded, blend_mix, depth_draw_never, depth_test_disabled;
/*
AUTHOR: Hannah "EMBYR" Crawford
ENGINE_VERSION: 4.0.3
HOW TO USE:
1. Create a MeshInstance3D node and place it in your scene.
2. Set it's size to 2x2.
3. Enable the "Flip Faces" option.
4. Create a new shader material with this shader.
5. Assign the material to the MeshInstance3D
LIMITATIONS:
Does not work well with TAA enabled.
MOBILE_NOTES:
The mobile renderer does not have access to the normal_roughness texture
so we must rely on techniques to reconstruct this information from the
depth buffer.
If you require support on mobile please uncomment the SUPPORT_MOBILE line
below. I have done my best to match the appearance between the two modes
however, mobile does not take into account smooth-shaded faces.
The high-quality reconstruction method used on mobile is rather heavy on
texture samples. If you would like to use the lower-quality recontruction
method for better performance, please uncomment the NAIVE_NORMAL_RECONSTRUCTION
line below.
*/
//#define SUPPORT_MOBILE
//#define NAIVE_NORMAL_RECONSTRUCTION
group_uniforms outline;
uniform vec4 outlineColor: source_color = vec4(0.0, 0.0, 0.0, 0.78);
uniform float depth_threshold = 0.025;
uniform float normal_threshold : hint_range(0.0, 1.5) = 0.5;
uniform float normal_smoothing : hint_range(0.0, 1.0) = 0.25;
group_uniforms thickness;
uniform float max_thickness: hint_range(0.0, 5.0) = 1.3;
uniform float min_thickness = 0.5;
uniform float max_distance = 75.0;
uniform float min_distance = 2.0;
group_uniforms grazing_prevention;
uniform float grazing_fresnel_power = 5.0;
uniform float grazing_angle_mask_power = 1.0;
uniform float grazing_angle_modulation_factor = 50.0;
uniform sampler2D DEPTH_TEXTURE : hint_depth_texture, filter_linear, repeat_disable;
#ifndef SUPPORT_MOBILE
uniform sampler2D NORMR_TEXTURE : hint_normal_roughness_texture, filter_linear, repeat_disable;
#else
varying flat mat4 model_view_matrix;
#endif// !SUPPORT_MOBILE
struct UVNeighbors {
vec2 center;
vec2 left; vec2 right; vec2 up; vec2 down;
vec2 top_left; vec2 top_right; vec2 bottom_left; vec2 bottom_right;
};
struct NeighborDepthSamples {
float c_d;
float l_d; float r_d; float u_d; float d_d;
float tl_d; float tr_d; float bl_d; float br_d;
};
UVNeighbors getNeighbors(vec2 center, float width, float aspect) {
vec2 h_offset = vec2(width * aspect * 0.001, 0.0);
vec2 v_offset = vec2(0.0, width * 0.001);
UVNeighbors n;
n.center = center;
n.left = center - h_offset;
n.right = center + h_offset;
n.up = center - v_offset;
n.down = center + v_offset;
n.top_left = center - (h_offset - v_offset);
n.top_right = center + (h_offset - v_offset);
n.bottom_left = center - (h_offset + v_offset);
n.bottom_right = center + (h_offset + v_offset);
return n;
}
float getMinimumDepth(NeighborDepthSamples ds){
return min(ds.c_d, min(ds.l_d, min(ds.r_d, min(ds.u_d, min(ds.d_d, min(ds.tl_d, min(ds.tr_d, min(ds.bl_d, ds.br_d))))))));
}
float getLinearDepth(float depth, vec2 uv, mat4 inv_proj) {
vec3 ndc = vec3(uv * 2.0 - 1.0, depth);
vec4 view = inv_proj * vec4(ndc, 1.0);
view.xyz /= view.w;
return -view.z;
}
NeighborDepthSamples getLinearDepthSamples(UVNeighbors uvs, sampler2D depth_tex, mat4 invProjMat) {
NeighborDepthSamples result;
result.c_d = getLinearDepth(texture(depth_tex, uvs.center).r, uvs.center, invProjMat);
result.l_d = getLinearDepth(texture(depth_tex, uvs.left).r , uvs.left , invProjMat);
result.r_d = getLinearDepth(texture(depth_tex, uvs.right).r , uvs.right , invProjMat);
result.u_d = getLinearDepth(texture(depth_tex, uvs.up).r , uvs.up , invProjMat);
result.d_d = getLinearDepth(texture(depth_tex, uvs.down).r , uvs.down , invProjMat);
result.tl_d = getLinearDepth(texture(depth_tex, uvs.top_left).r, uvs.top_left, invProjMat);
result.tr_d = getLinearDepth(texture(depth_tex, uvs.top_right).r, uvs.top_right, invProjMat);
result.bl_d = getLinearDepth(texture(depth_tex, uvs.bottom_left).r, uvs.bottom_left, invProjMat);
result.br_d = getLinearDepth(texture(depth_tex, uvs.bottom_right).r, uvs.bottom_right, invProjMat);
return result;
}
float remap(float v, float from1, float to1, float from2, float to2) {
return (v - from1) / (to1 - from1) * (to2 - from2) + from2;
}
float fresnel(float amount, vec3 normal, vec3 view) {
return pow((1.0 - clamp(dot(normalize(normal), normalize(view)), 0.0, 1.0 )), amount);
}
float getGrazingAngleModulation(vec3 pixel_normal, vec3 view) {
float x = clamp(((fresnel(grazing_fresnel_power, pixel_normal, view) - 1.0) / grazing_angle_mask_power) + 1.0, 0.0, 1.0);
return (x + grazing_angle_modulation_factor) + 1.0;
}
float detectEdgesDepth(NeighborDepthSamples depth_samples, vec3 pixel_normal, vec3 view) {
float n_total =
depth_samples.l_d +
depth_samples.r_d +
depth_samples.u_d +
depth_samples.d_d +
depth_samples.tl_d +
depth_samples.tr_d +
depth_samples.bl_d +
depth_samples.br_d;
float t = depth_threshold * getGrazingAngleModulation(pixel_normal, view);
return step(t, n_total - (depth_samples.c_d * 8.0));
}
// Reconstruction helpers
// Source: https://www.reddit.com/r/godot/comments/v70p2k/improved_normal_from_depth/
#ifdef SUPPORT_MOBILE
vec3 reconstructWorldPosition(float depth, mat4 model_view, mat4 inv_proj, vec2 screen_uv, mat4 world, mat4 inv_cam){
vec4 pos = inverse(model_view) * inv_proj * vec4((screen_uv * 2.0 - 1.0), depth * 2.0 - 1.0, 1.0);
pos.xyz /= (pos.w + 0.0001 * (1.-abs(sign(pos.w))));
return (pos * inv_cam).xyz + world[3].xyz;
}
#ifndef NAIVE_NORMAL_RECONSTRUCTION
vec3 reconstructWorldNormal(sampler2D depth_tex, mat4 model_view, mat4 inv_proj, vec2 screen_uv, mat4 world, mat4 inv_cam, vec2 viewport_size) {
vec2 e = vec2(1.0 / viewport_size);
float c0 = texture(depth_tex, screen_uv ).r;
float l2 = texture(depth_tex, screen_uv - vec2(2,0) * e).r;
float l1 = texture(depth_tex, screen_uv - vec2(1,0) * e).r;
float r1 = texture(depth_tex, screen_uv + vec2(1,0) * e).r;
float r2 = texture(depth_tex, screen_uv + vec2(2,0) * e).r;
float b2 = texture(depth_tex, screen_uv - vec2(0,2) * e).r;
float b1 = texture(depth_tex, screen_uv - vec2(0,1) * e).r;
float t1 = texture(depth_tex, screen_uv + vec2(0,1) * e).r;
float t2 = texture(depth_tex, screen_uv + vec2(0,2) * e).r;
float dl = abs(l1 * l2 / (2.0 * l2 - l1) - c0);
float dr = abs(r1 * r2 / (2.0 * r2 - r1) - c0);
float db = abs(b1 * b2 / (2.0 * b2 - b1) - c0);
float dt = abs(t1 * t2 / (2.0 * t2 - t1) - c0);
vec3 ce = reconstructWorldPosition(c0, model_view, inv_proj, screen_uv, world, inv_cam);
vec3 dpdx = (dl<dr) ? ce-reconstructWorldPosition(l1, model_view, inv_proj, screen_uv - vec2(1,0) * e, world, inv_cam) :
-ce+reconstructWorldPosition(r1, model_view, inv_proj, screen_uv + vec2(1,0) * e, world, inv_cam) ;
vec3 dpdy = (db<dt) ? ce-reconstructWorldPosition(b1, model_view, inv_proj, screen_uv - vec2(0,1) * e, world, inv_cam) :
-ce+reconstructWorldPosition(t1, model_view, inv_proj, screen_uv + vec2(0,1) * e, world, inv_cam) ;
return normalize(cross(dpdx,dpdy));
}
#else
vec3 reconstructWorldNormal(sampler2D depth_tex, mat4 model_view, mat4 inv_proj, vec2 screen_uv, mat4 world, mat4 inv_cam, vec2 viewport_size) {
vec3 pos = reconstructWorldPosition(texture(depth_tex, screen_uv).x, model_view, inv_proj, screen_uv, world, inv_cam);
return normalize(cross(dFdx(pos), dFdy(pos)));
}
#endif//!NAIVE_NORMAL_RECONSTRUCTION
float detectEdgesNormalReconstructed(UVNeighbors uvs, sampler2D depth_tex, mat4 model_view, mat4 inv_proj, vec2 screen_uv, mat4 world, mat4 inv_cam, vec2 viewport_size){
vec3 n_u = reconstructWorldNormal(depth_tex, model_view, inv_proj, uvs.up, world, inv_cam, viewport_size);
vec3 n_d = reconstructWorldNormal(depth_tex, model_view, inv_proj, uvs.down, world, inv_cam, viewport_size);
vec3 n_l = reconstructWorldNormal(depth_tex, model_view, inv_proj, uvs.left, world, inv_cam, viewport_size);
vec3 n_r = reconstructWorldNormal(depth_tex, model_view, inv_proj, uvs.right, world, inv_cam, viewport_size);
vec3 n_tl = reconstructWorldNormal(depth_tex, model_view, inv_proj, uvs.top_left, world, inv_cam, viewport_size);
vec3 n_tr = reconstructWorldNormal(depth_tex, model_view, inv_proj, uvs.top_right, world, inv_cam, viewport_size);
vec3 n_bl = reconstructWorldNormal(depth_tex, model_view, inv_proj, uvs.bottom_left, world, inv_cam, viewport_size);
vec3 n_br = reconstructWorldNormal(depth_tex, model_view, inv_proj, uvs.bottom_right, world, inv_cam, viewport_size);
vec3 normalFiniteDifference0 = n_tr - n_bl;
vec3 normalFiniteDifference1 = n_tl - n_br;
vec3 normalFiniteDifference2 = n_l - n_r;
vec3 normalFiniteDifference3 = n_u - n_d;
float edgeNormal = sqrt(
dot(normalFiniteDifference0, normalFiniteDifference0) +
dot(normalFiniteDifference1, normalFiniteDifference1) +
dot(normalFiniteDifference2, normalFiniteDifference2) +
dot(normalFiniteDifference3, normalFiniteDifference3)
) * 0.5;
return smoothstep(normal_threshold - normal_smoothing, normal_threshold + normal_smoothing, edgeNormal);
}
#else
float detectEdgesNormal(UVNeighbors uvs, sampler2D normTex, vec3 camDirWorld){
vec3 n_u = texture(normTex, uvs.up).xyz;
vec3 n_d = texture(normTex, uvs.down).xyz;
vec3 n_l = texture(normTex, uvs.left).xyz;
vec3 n_r = texture(normTex, uvs.right).xyz;
vec3 n_tl = texture(normTex, uvs.top_left).xyz;
vec3 n_tr = texture(normTex, uvs.top_right).xyz;
vec3 n_bl = texture(normTex, uvs.bottom_left).xyz;
vec3 n_br = texture(normTex, uvs.bottom_right).xyz;
vec3 normalFiniteDifference0 = n_tr - n_bl;
vec3 normalFiniteDifference1 = n_tl - n_br;
vec3 normalFiniteDifference2 = n_l - n_r;
vec3 normalFiniteDifference3 = n_u - n_d;
float edgeNormal = sqrt(
dot(normalFiniteDifference0, normalFiniteDifference0) +
dot(normalFiniteDifference1, normalFiniteDifference1) +
dot(normalFiniteDifference2, normalFiniteDifference2) +
dot(normalFiniteDifference3, normalFiniteDifference3)
);
return smoothstep(normal_threshold - normal_smoothing, normal_threshold + normal_smoothing, edgeNormal);
}
#endif//SUPPORT_MOBILE
void vertex() {
POSITION = vec4(VERTEX, 1.0);
#ifdef SUPPORT_MOBILE
model_view_matrix = INV_VIEW_MATRIX * mat4(VIEW_MATRIX[0],VIEW_MATRIX[1],VIEW_MATRIX[2],VIEW_MATRIX[3]);;
#endif
}
void fragment() {
float aspect = float(VIEWPORT_SIZE.y) / float(VIEWPORT_SIZE.x);
UVNeighbors n = getNeighbors(SCREEN_UV, max_thickness, aspect);
NeighborDepthSamples depth_samples = getLinearDepthSamples(n, DEPTH_TEXTURE, INV_PROJECTION_MATRIX);
float min_d = getMinimumDepth(depth_samples);
float thickness = clamp(remap(min_d, min_distance, max_distance, max_thickness, min_thickness), min_thickness, max_thickness);
float fade_a = clamp(remap(min_d, min_distance, max_distance, 1.0, 0.0), 0.0, 1.0);
n = getNeighbors(SCREEN_UV, thickness, aspect);
depth_samples = getLinearDepthSamples(n, DEPTH_TEXTURE, INV_PROJECTION_MATRIX);
#ifndef SUPPORT_MOBILE
vec3 pixel_normal = texture(NORMR_TEXTURE, SCREEN_UV).xyz;
#else
vec3 pixel_normal = reconstructWorldNormal(DEPTH_TEXTURE, model_view_matrix, INV_PROJECTION_MATRIX, SCREEN_UV, MODEL_MATRIX, INV_VIEW_MATRIX, VIEWPORT_SIZE.xy);
#endif
float depthEdges = detectEdgesDepth(depth_samples, pixel_normal, VIEW);
#ifndef SUPPORT_MOBILE
float normEdges = min(detectEdgesNormal(n, NORMR_TEXTURE, CAMERA_DIRECTION_WORLD), 1.0);
#else
float normEdges = min(detectEdgesNormalReconstructed(n, DEPTH_TEXTURE, model_view_matrix, INV_PROJECTION_MATRIX, SCREEN_UV, MODEL_MATRIX, INV_VIEW_MATRIX, VIEWPORT_SIZE.xy), 1.0);
#endif
ALBEDO.rgb = outlineColor.rgb;
ALPHA = max(depthEdges, normEdges) * outlineColor.a * fade_a;
}
thanks! it woks!
That’s looking sooo good waow
[…] pour Godot 4, cet effet post-processus crée un contour net autour des objets dans votre scène 3D, apportant un effet […]
please fix this i can see unseenable object’s outlines.. fix this or u gay
(i m joking pls no kill me)
Very cool Shader!! but would it be possible to exclude some meshes, maybe via the layers? i tried it but it doesnt work and im not familiar enough with shader code to implement it myself (if its even possible)
Hello, thank you for making this shader. I think I am having a problem where outlines are sometimes drawn in the gaps between gridmap tiles that exist due to floating point errors. I think the grazing settings can prevent this but I don’t know how to set them. I’ll keep playing around with it but I thought I should mention it here.
Nice technique, this shader worked right out of the box on godot 4.2 rc2
Thank you so much for this, especially the mobile support! I was running into the normal_roughness limitation and stumbled on a thread that suggested it would be possible to derive normal data from the depth buffer but was too daunted to undertake it myself.
Thank you for sharing your expertise with the community.
I love you. I’ve wrangled with other shaders for around a week now, all of which still good, but none come as close to this.. it’s just so brilliant. thank you <3
Hi. A great piece of work but struggling with AA. The outlines always appear jagged as if AA wasn’t applying to them at all. The description clearly states this method doesn’t work with TAA but it turns out it doesn’t work with MSAA or any other form of AA in general?
Anyone please?
Thanks
Thanks for sharing !
Love how this looks, but for some reason when my camera is rotated enough along the X axis (looking down) the outlines all disappear.
I tried messing with the parameters for the shader, but none of them seem to affect this. Any ideas?
Would also love a description of what the parameters do!
Figured it out; the
MeshInstance3Dis supposed to be a child of the camera! Now it works great and looks so good. Thanks for sharing it!!!I tried putting the MeshInstane3D as a child of the camera and I still get the same effect. Is there anything else I could try?
Did you figured it out?
Another thing I noticed: Make sure that the mesh is not at
0,0,0since that will cause it to be culled by the near plane of the camera.By default, the camera in Godot has a near plane of 0.05, so if you place the mesh at
0,0,0.6then it will be slightly in front of the camera and not be culled.Heads up, this appears to be broken in Godot 4.3 because of the changes mentioned here:
https://godotengine.org/article/introducing-reverse-z/
Any ideas how to fix it?
I uploaded a fixed version here!
https://godotshaders.com/shader/high-quality-post-process-outline-fixed-for-4-3/
P.S. The fixed version is only needed for Godot 4.3-RC1. The issue was fixed in the release version of 4.3, so the changes are not neeeded.
is there a way to take this shader and make it only detect edges of meshes that are facing towards the camera?
kind of like this shader: https://godotshaders.com/shader/clean-pixel-perfect-outline-via-material-3/
but the problem i have with this shader is that it is not a post processing shader and that if you overlap objects that are not connected but are distant with space in between then the edges connect instead making an outline. i would like outlines to connect when two meshes are connected or right next to each other but if they have any distant space between them then i dont want the outline to connect.
im a total noob so i have no idea how to do this. i know this is a super specific outline shader variation but i really want this effect. i dont mind figuring this out myself but if anyone has experience and can guide me then that would help. thanks.
i figured it out…