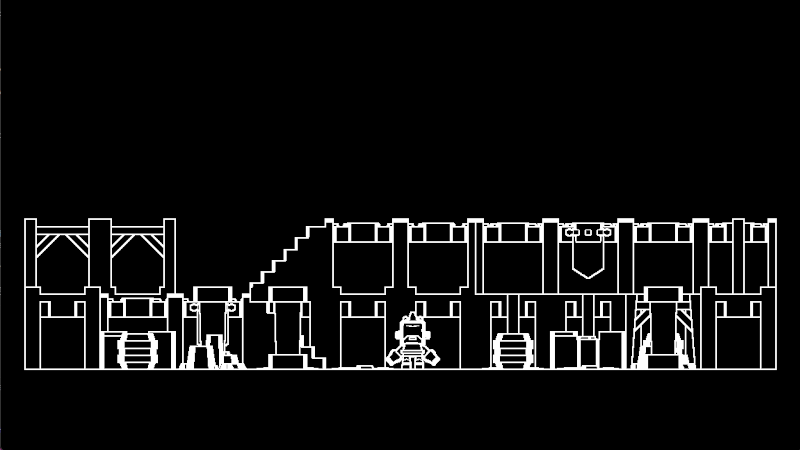
Depth-based Edge Detection with Sobel Operator – Screenspace
Spatial shader that uses the depth texture to find edges. This is a less-complex look at edge detection, perfect for learning screenspace shaders.
Updated for Godot 4.3 ♥ Thank you Liam!
Instructions:
- Create a new MeshInstance3D in your 3D scene
- Add a QuadMesh mesh to the instance
- Optional? Move the mesh out of the center of the screen
- In `Geometry` for the instance, increase the `Extra Cull Margin` to the max
- As of writing, 16384 m
- In the Quadmesh, increase the size from 1×1 m to 2×2 m
- In the Quadmesh, check the `Flip Faces` box so that it’s `True`
- In the Quadmesh, in `Material`, choose `New Shader Material`
- In the Material, in `Shader`, choose `New Shader`
- Here you can choose a name for your shader and we can start customizing!
Notes:
This shader does an okay job at edge detection, but it has some issues.
- In a perspective camera mode, flat areas that stretch toward the horizon can get picked up as a huge edge because of how fast it falls away from the camera
- there are lots of ways to solve this issue, the one I’ve heard about most is to use the normal vectors
- basically to make sure the two pixels are on different planes
- you can get thinner lines by reducing your offset
vec2 offset = 0.5 / VIEWPORT_SIZE;- this effectively upscales your depth texture when looking at neighboring pixels
- I have been told this has an impact on performance, so be wary
Check out my full write-up here: https://github.com/nuzcraft/unga-dungeon/blob/main/shader_notes/depth_based_edge_detection_w_sobel.md
Models by Kenny – https://kenney.nl/
Shader code
shader_type spatial;
render_mode unshaded;
uniform sampler2D SCREEN_TEXTURE: hint_screen_texture, filter_linear_mipmap;
uniform sampler2D DEPTH_TEXTURE: hint_depth_texture, filter_linear_mipmap;
uniform float edge_threshold = 0.1;
uniform vec3 line_color: source_color = vec3(1.0);
uniform vec3 background_color: source_color = vec3(0.0);
const mat3 sobel_y = mat3(
vec3(1.0, 0.0, -1.0),
vec3(2.0, 0.0, -2.0),
vec3(1.0, 0.0, -1.0)
);
const mat3 sobel_x = mat3(
vec3(1.0, 2.0, 1.0),
vec3(0.0, 0.0, 0.0),
vec3(-1.0, -2.0, -1.0)
);
float linearize_depth(vec2 uv_coord, mat4 proj_matrix){
float depth = texture(DEPTH_TEXTURE, uv_coord).x;
vec3 ndc = vec3(uv_coord, depth) * 2.0 - 0.0;
vec4 view = proj_matrix * vec4(ndc, 1.0);
view.xyz /= view.w;
float linear_depth = -view.z;
return linear_depth;
}
void vertex(){
POSITION = vec4(VERTEX.xy, 1.0, 1.0);
}
void fragment() {
vec2 uv = SCREEN_UV;
vec4 screen_color = texture(SCREEN_TEXTURE, uv);
float depth = linearize_depth(uv, INV_PROJECTION_MATRIX);
vec2 offset = 0.5 / VIEWPORT_SIZE;
float n = linearize_depth(uv + vec2(0.0, -offset.y), INV_PROJECTION_MATRIX);
float s = linearize_depth(uv + vec2(0.0, offset.y), INV_PROJECTION_MATRIX);
float e = linearize_depth(uv + vec2(offset.x, 0.0), INV_PROJECTION_MATRIX);
float w = linearize_depth(uv + vec2(-offset.x, 0.0), INV_PROJECTION_MATRIX);
float nw = linearize_depth(uv + vec2(-offset.x, -offset.y), INV_PROJECTION_MATRIX);
float ne = linearize_depth(uv + vec2(offset.x, -offset.y), INV_PROJECTION_MATRIX);
float sw = linearize_depth(uv + vec2(-offset.x, offset.y), INV_PROJECTION_MATRIX);
float se = linearize_depth(uv + vec2(offset.x, offset.y), INV_PROJECTION_MATRIX);
mat3 surrounding_pixels = mat3(
vec3(nw, n, ne),
vec3(w, depth, e),
vec3(sw, s, se)
);
float edge_x = dot(sobel_x[0], surrounding_pixels[0]) + dot(sobel_x[1], surrounding_pixels[1]) + dot(sobel_x[2], surrounding_pixels[2]);
float edge_y = dot(sobel_y[0], surrounding_pixels[0]) + dot(sobel_y[1], surrounding_pixels[1]) + dot(sobel_y[2], surrounding_pixels[2]);
float edge = sqrt(pow(edge_x, 2.0)+pow(edge_y, 2.0));
if (edge > edge_threshold) {
ALBEDO = line_color;
} else {
ALBEDO = background_color;
}
}
Live Preview



